実践記事を書かずに自分の報告をする会、最近ツナガロッタが楽しい
けど設定の良い店が参加するようになったらワンダー勝てなくなるだろうなぁ…
自作ラッシュ報告会です、ハード面がほぼ完成して嬉しいぞ~これ
目標はGW中に本稼働です、全国で稼働するぞ(1件)

軸に取り付けている部分と羽の間にボールが挟まりまくる現象が発生
もうどうしようもなかったので羽の形を変更しました
…やっぱりあとから問題出まくるんだなぁ
これだけで3時間とか飛んでいます

サーボモーターの上にスパイラル入賞口がセットされますがコードが邪魔すぎる
本当に寸法がカツカツすぎます…開始当初の規模で出来たならどれだけ楽だったか
全体的に小さいほどパーツの大きさが無視できなくなってきます

さらにさらに打ち上げも限界があったのでガイドレールが上ドームに追加されました
最早段々と銀河の面影が消えていっていますが突っ込んではならない
このガイドレールも曲者で、羽の回転速度が上がれば打ち上げ頻度も多すぎるくらいになります
が、モーターの発熱が尋常じゃなくなるので危ないってレベルじゃない
5連ごとに停止しないといけないくらいアツゥイ!
今はUFO(直方体)をセロハン接着中、LEDを無視すればもう完成でも良いレベル
ただLEDは必要ですね…取り付け位置に悩むところ
多分皿の裏側にセロハン接着される可能性が
===その後の日===

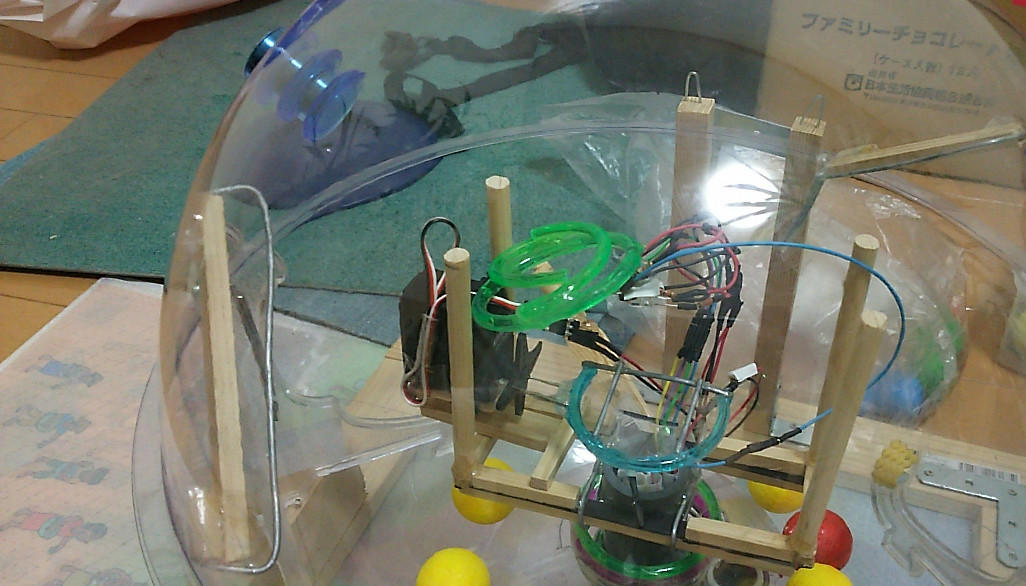
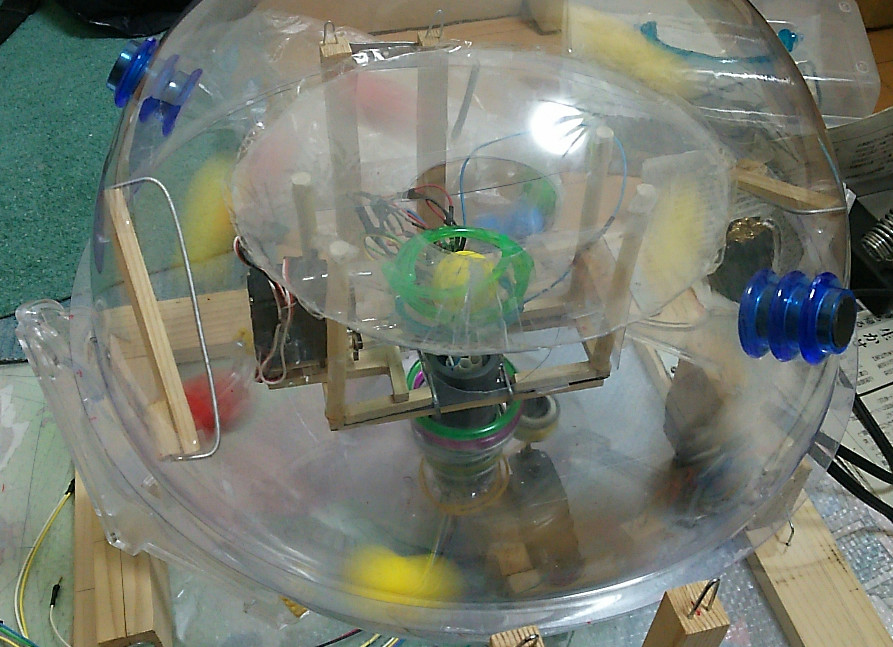
組み上げました、結局こんな形に収まった模様

見づらいですが、PPシートで囲ってあります
謎の針金があったりもうよく分かりませんがLED設置まではこれで十分稼働できました
カバーはもちろん内部にボールが入り込まないためのもの、UFOの形にするのは諦めました
また横からのINを防止する目的もありますが流石に稀に入ってしまう模様
それでもボールが引っかかるエリアは少ない(存在はします)のでまぁ良いんじゃないかな
問題があるとすればダイレクトIN防止カバーのせいで皿から降ってきたボールの入賞率がクッソ高い
位置変えなきゃ

実際に稼働させるとこんな感じ、モーターはデジカメに使っていたエネループ4本を利用したらいい感じだったので採用、エコですねぇ
軸の振動が酷かったのでボンド接着に切り替えた話をしたかどうか忘れましたがまぁそんなところです
一時期ボールが挟まりまくるせいで軸の輪ゴムが何度も取れましたが一応外せるものを全て外せば輪ゴムの再取り付けは可能だと分かったのでこれでメンテナンス性は確保できました
結構理想通りかも

入賞したらこんな感じ、視認性もまぁ十分でしょう
あとは電子部品が取り付け時に壊れていないかが不安ですが…その前にまだやることが残っている
まとめ
実機とどうしても異なってしまう仕様
・ボールガイドの存在
これがあるせいで皿でボールがクルクルする頻度は実機より少ないです、しないことはないですけど
また打ち上げ頻度も明らかに少ないので寂しい感じではあります、やむを得ない
・モーターの発熱と排出機構の問題
やっぱりアツゥイ!のと前からの問題だった排出機構、この両方を解決する方法として…
入賞が確認されたらモーターを停止し、色判定→3回排出行動→モーター再始動
とすることにします、3回排出させる理由はボールが入賞口に最高で3個引っかかるから
モーター再始動までに7セグの変動とかをさせればまあ…良いんじゃないの(適当)
もしモーターがやばそうなら神の手で冷やす(物理)