
ちょっとばかし体調崩していました、もうおふとぅんが気持ちよくて何のその
おふとぅん纏って外出したい
===自作ギンガーン完成までもう少しか===
自作銀河の完成度が90%かってところで微妙に厄介な問題が出てくるのは仕様ですかね…
まあただの設計ミスなんですけど!
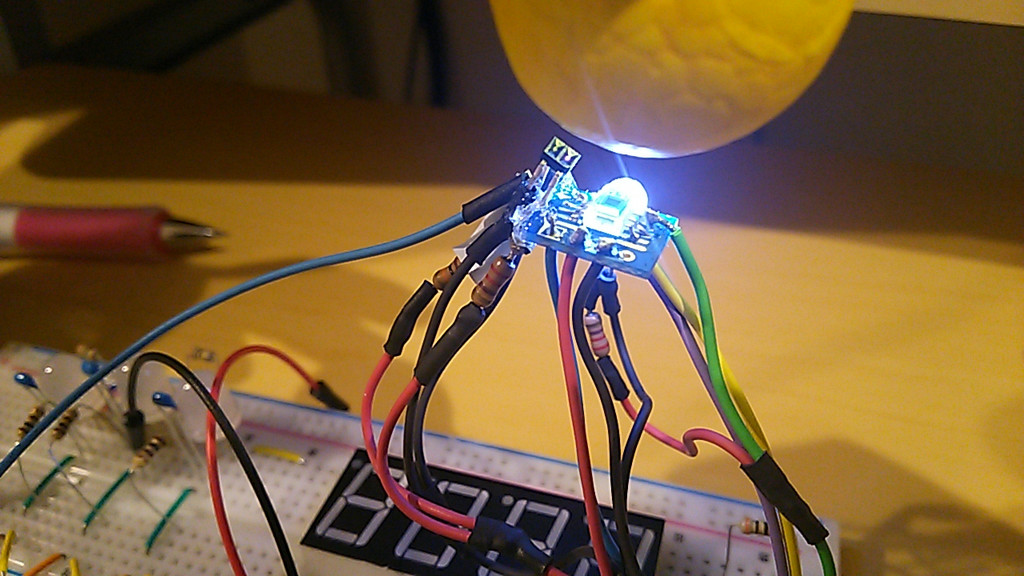
部品3つをボンド接着しました、電子部品をボンドとかガチな人が聞いたら絶句しそう
まあ自作だから許して…接着剤は電気を通さないので大丈夫です
1回はんだが取れて悲惨なことになりかけたけどな!
繋げたのは前に紹介したカラーセンサ、あとはそれに光を取り込ませるための照明用白LED、そして画像では物凄く見づらいフォトリフレクタです
フォトリフレクタと言うのは赤外線発信装置と赤外線受信装置が一体化したものです、そう言うとかっこいいけど実際はクソ地味なパーツで機構自体は相変わらず数ミリサイズしかないです
画像は実際にボールを近づけてカラーセンサに色を読み込ませている状態です
ボールが近づくとフォトリフレクタが「近くに何かあるよー」と言う信号を出してくれるので拾います
それを受け取ったらLEDが光りつつカラーセンサ君が色を読み取ってくれることでボールの色を認識
これで入賞したボールの色が判別できる機構ワンセットということになります
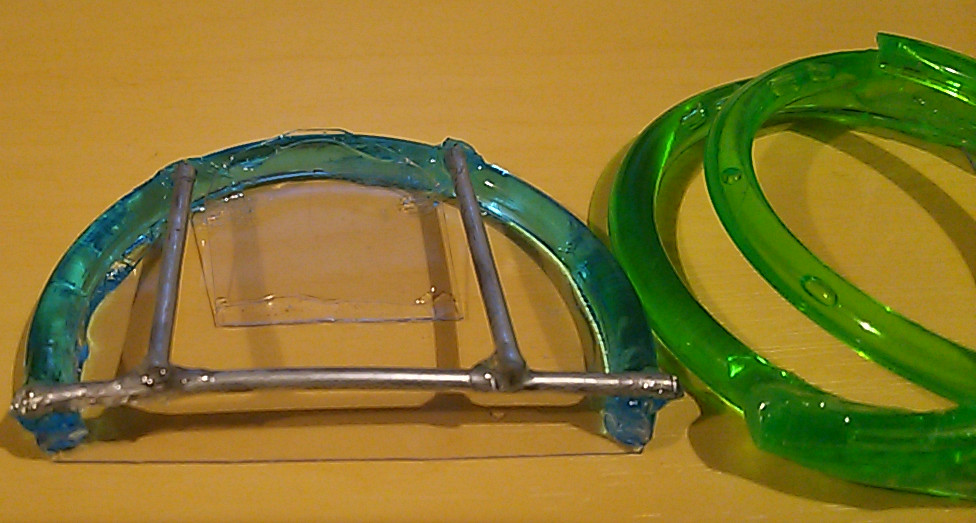
右にあるのが前に作っておいた「すぱいらる★入賞口」、左にあるのが今回作ったボールを受け止めるための加工リングです
すぱいらるを通ったボールが受け止めリングの真上に落ち、先ほどの検出機構が機能します
検出が終わったらボールの排出が必要です、この加工リングは前に紹介したサーボモーター君に直接ボンド接着される予定です
サーボモーターは角度を指定して回転できるので、加工リングのリング側をすぱいらる口の部分に持ってくることでボールの排出+入賞口の一定時間封鎖がダブルで出来るとっても素晴らしい機構になるはずだったんですよ
ボールを排出しようとすると検出機構とモロにぶつかることが今更判明、何故確認しなかった
サーボモーターのパワーは強いので、無理矢理回したら検出機構が間違いなくぶっ壊れます
と言うことで妥協案を探した結果、
加工リングの回転方向を逆にすることにしました
そうすると排出方向がリング側になり非常に扱いが楽ですが入賞口の封鎖は不可能です
なのでボール検出後一定時間垂れ流し状態→リングを戻して入賞待ち、と言う形になりそうです
そのためボールを拾ったかどうか確認し辛くなりました…もう妥協の塊です
ええい!とにかくもう動かしたいんじゃ!
ついでに羽カバーが取れないことも判明したので何とかします…
6-5、わんわん言ってたけどJPCなことには変わらない
ウェルカムトゥカラコロッタ、ジャックポットチャァァァァァンス!
って言うか一体何記事これ続けるつもりなんですかね?
記事数のためにも一発で決めましょう!
スタート、画像ばっかり